
Shijie Lin
Postgraduate
![]()
![]() [CV]
[CV]
E-mail: linshijie@whu.edu.cn
Our UAV-Bottle dataset: [UAV-BD].
Our Event-based lane extraction dateset: [DET].
ROS driver for Celex4 event camera: Celex4-ROS.
About me
I acquired my bachelor degree at College of Electronics and Information Engineering, Sichuan University. And I am currently a postgraduate student in School of Electronic Information, Wuhan University.
I am working at Signal Processing Lab (SPL), supervised by Prof. Wen Yang since Sep. 2017.
I was the 1st Prize winner (China Round) at 2016 Microsoft Imagine Cup and got Finalist Prize (Global Rank:6/70) at ICRA2018 DJI Robomaster AI Challenge.
News
- [Nov. 2019] One paper submitted to CVPR.
- [Jul. 2019] One paper submitted to RA-L.
- [May. 2019] One paper accepted by Sensors.
- [Sep. 2018] Awarded the National Scholarship for postgraduate (TOP 1%, 20000 CNY).
- [Sep. 2018] Awarded 1st Postgraduate Academic Scholarship of Wuhan University (Tuition+2000 CNY).
Education
- School of Electronic Information, Wuhan University, Hubei, China
Sep. 2017 -- Jul. 2019. Signal Processing Lab (SPL), supervised by Prof. Wen Yang. - Exchange Student, Mita Campus, Keio University, Tokyo, Japan
Feb. 2017. The international center. - College of Electronics and Information Engineering, Sichuan University, Sichuan, China
Sep. 2013 -- Jul. 2017
Publication
Paper
- S. Lin, F. Xu, X. Wang, W. Yang, L. Yu. "Efficient Spatial-Temporal Normalization of SAE Representation for Event Camera." IEEE Robotics and Automation Letters (RA-L), under review. [Code] [Preprint]
- S. Lin*, J. Wang*, R. Peng, W. Yang (2019). "Development of an Autonomous Unmanned Aerial Manipulator Based on a Real-Time Oriented-Object Detection Method." Sensors (IF: 3.302), 19(10), 2396. [Paper]
- F. Xu*, S. Lin*, et al. "Matching Neuromorphic Events and Color Images via Adversarial Learning." 2020 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), under review.
- H. Yu, S. Lin, J. Wang, K. Fu, W. Yang. "An Intelligent Unmanned Aircraft System for Wilderness Search and Rescue." International Micro Air Vehicles Conference and Flight Competition (IMAV), 2017, oral. [Paper]
- X. Wang, Y. Du, S. Lin, P. Cui, Y. Shen, Y. Yang. "adVAE: a Self-adversarial Variational Autoencoder with Gaussian Anomaly Prior Knowledge for Anomaly Detection." Knowledge-Based Systems, accept. [Preprint]
- F. Xu, W. Yang, S. Lin, H. Luo, G. Xia "Mental Retrieval of Remote Sensing Images via Adversarial Sketch-Image Feature Learning." IEEE Transactions on Geoscience and Remote Sensing, under review.
Patent (Selected)
- S. Lin, W. He, H. Yu, W. Yang. A Multifunctional Unmanned Aerial Vehicle for Field Search and Rescue, CN206926823U, Jul. 2017.
- S. Lin, H. Zhao, F. Jiang, P. Xue, S. Li, Z. Guo. A Dot Matrix Braille Touch Screen, CN106775123A, Jan. 2017.
- J. Huang, X. Wang, S. Lin, H. Zhao, Z. Hu. A Pull-type Braille Screen and its Components Reuse Method, CN106781881A, Jan. 2017.
Experiences
- Attend the 2019 EE HKPFS Summer School of City University of Hong Kong, Jul. 2019
- Attend the Summer School of Simultaneous Localization and Mapping(SLAM) held by CAD&CG State Key Lab, Zhejiang University. Zhejiang, China, Jul. 2018.
- Attend the 2018 IEEE International Conference on Robotics and Automation (ICRA) and Workshop of Aerial Robotic Inspection and Maintenance: Research Challenges, Field Experience and Industry Needs, Brisbane, Australia, May. 2018.
- Attend the 9th International Micro Air Vehicles Conference, Toulouse, France, Sep. 2018.
- Attend the Seminar of Frontier Deep Learning Research held by China Computer Federation. Hubei, China, Nov. 2017.
Awards & Honors
Scholarship
- National Scholarship for Postgraduate, Oct. 2018 (TOP 1%)
- 1st Prize, Postgraduate Academic Scholarship of Wuhan University, Sep. 2018 (TOP 5%)
- 1st Prize, Postgraduate Academic Scholarship of Wuhan University, Sep. 2017 (TOP 5%)
- 1st Prize, Postgraduate Entrance Scholarship of Wuhan University, Oct. 2017 (TOP 5%)
- 1st Prize, Outstanding Scholarship of Sichuan University, Oct. 2016 (TOP 5%)
- 1st Prize, Individual Scholarship of Sichuan University, Nov. 2015 (TOP 8%)
- 2nd Prize, Individual Scholarship of Sichuan University, Nov. 2014 (TOP 10%)
Contest
- 1st Prize & Best paper, National Postgraduate Electronic Design Competition, Aug. 2018 (National Rank: 5/2437, TOP 0.2%)
- Finalist Prize, ICRA2018 DJI Robomaster AI Challenge, May. 2018 (Global Rank: 6/70)
- Finalist Prize, DJI Robomaster Aerial Robot Challenge, May. 2017
- 1st Prize, Microsoft Imagine Cup 2016 Global Students Technology Competition (China Round), Apr. 2016 (TOP 1%)
- 1st Prize, National Undergraduate Electronic Design Competition, Aug. 2015 (TOP 1%)
Activity
- Excellent Postgraduate Student of Wuhan University, Dec. 2018
- Excellent Undergraduate Thesis of Sichuan University, Jun. 2017
- Excellent Student Cadre of Sichuan University, Nov. 2015
- Outstanding Academic Student Group Leader of Sichuan University, Jul. 2015
- Excellent Student Cadre of Sichuan University, Nov. 2014
- Outstanding Academic Student Group Leader of Sichuan University, Jul. 2014
Selected Works [more]
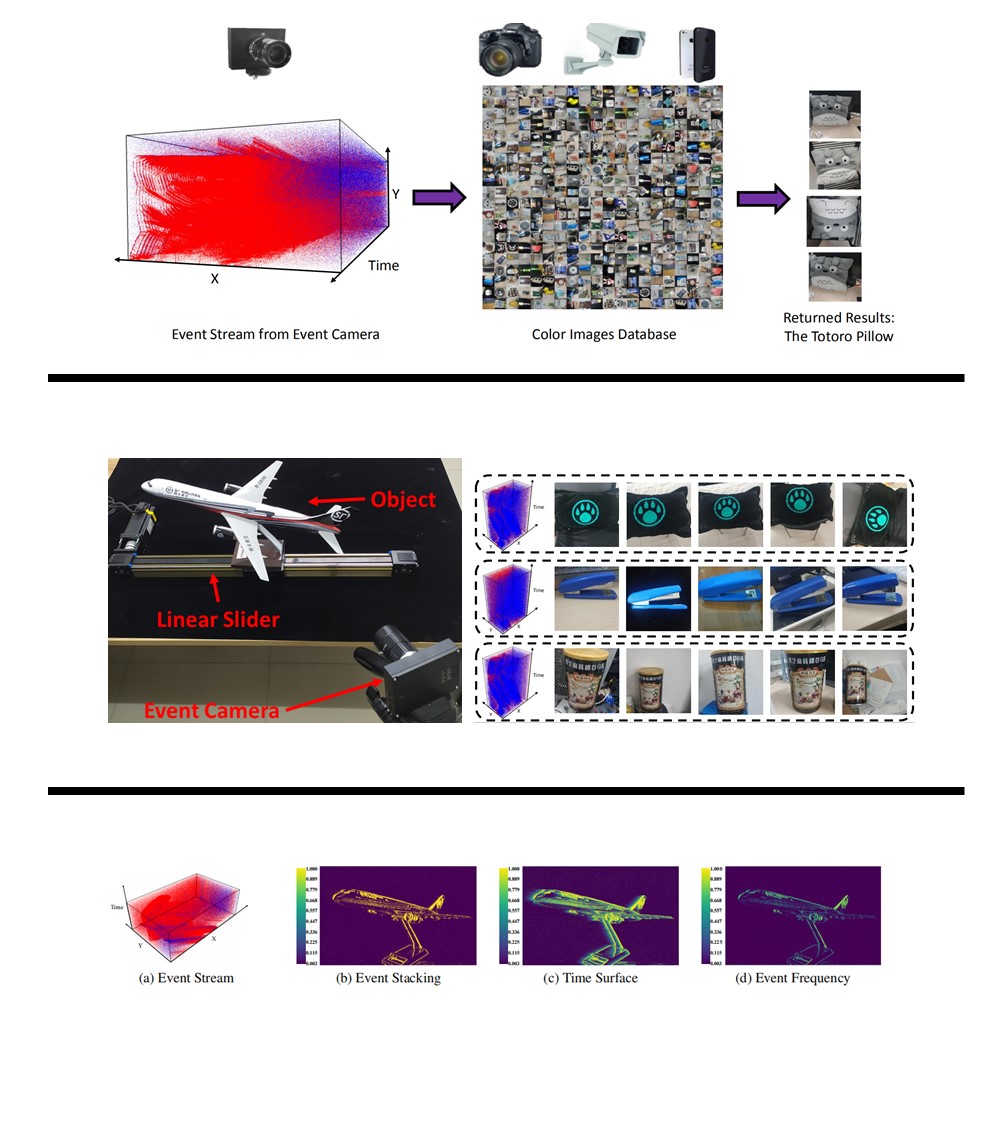
Cross-Modal Matching Between Neuromorphic Events and Color Images via Adversarial Learning
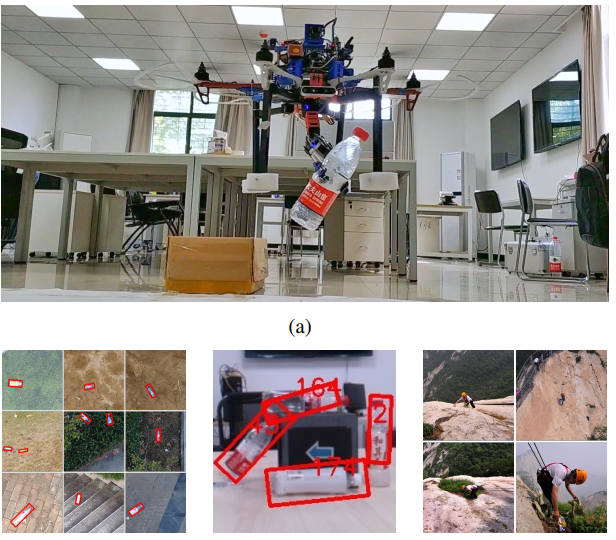
In this paper, we propose the Event-Based Image Retrieval (EBIR) task. Given an event stream depicting a particular object as query, the aim is to retrieve color images containing the same object that may be captured under different views, backgrounds, or with occlusions. We address the EBIR task by formulating an EBIR framework to jointly model neuromorphic events and color images into a common embedding space, where adversarial learning is used to align the feature distributions of the two modalities of data in the embedding space. We also contribute to the community the first EBIR dataset EC180 with 180 objects, where each object has an event stream and five color images.

Efficient Spatial-Temporal Normalization of SAE Representation for Event Camera
In this work, we proposed a highly efficient normalization method named chain normalization and an improved ordering strategy. By embedding the inherent nature of SAE, our method can not only run fast but also reach the highest performance without manual parameter tuning. In the experiments, our algorithm can run significantly faster than the previous methods. To further validate the normalized results, we conduct object recognition experiments on two large event-based open datasets. Experimental results show that our method achieves the highest classification accuracy among other normalization methods.
Toward Autonomous Rotation-Aware Unmanned Aerial Grasping
S. Lin, J. Wang, R. Peng, W. Yang.
In this work, we developed a vision-based autonomous UAM with a 3DoF robotic arm for rotational grasping and with a displacement compensation system for compensating the center of gravity. And we proposed a novel detection approach called Rotation-SqueezeDet to enable rotation-aware grasping, which can give the target position and rotation angle in near real-time on Jetson TX2.
[Open-hardware] [Paper]

ICRA2018 DJI Robomaster AI Challenge
W. He, S. Lin, Q. Cui, R. Peng, J. Wang, H. Yu.
The ICRA 2018 DJI RoboMaster AI Challenge requires robots to drive and launch projectiles using artificial intelligence related technologies. Each team is required to build up to TWO autonomous AI robots to compete in a 5m × 8m arena filled with various obstacles. To win, a team must defeat TWO AI robots presented by the RoboMaster Organizing Committee.
We won the Finalist Prize, Global Rank:6/70 of ICRA2018 DJI Robomaster AI Challenge
Tech: ROS, C++, Python, Tensorflow, Solidworks, Embedded Programming
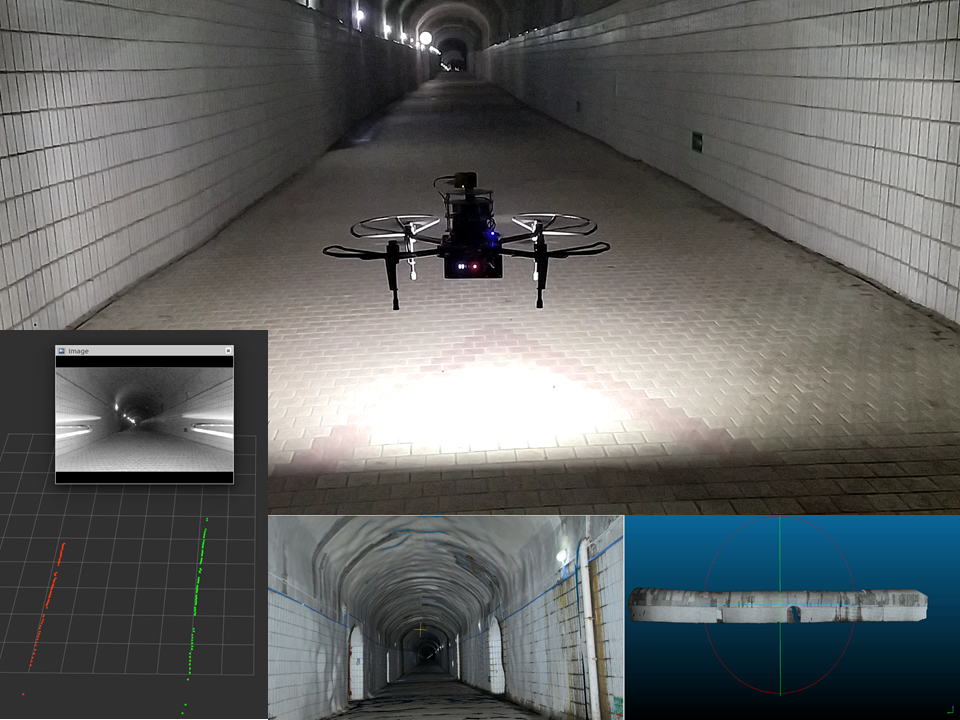
Development of an Intelligent Unmanned Aircraft System for Tunnel Inspection (thesis, in progress)
In this work, I developed a tunnel inspection system based on Pixhawk4 and DJI M100 drone. I Employed point cloud filters and RANSAC line fitting for tunnel perception. And I employed VINS-Mono for localization. With several lab members, I successfully conducted multiple autonomous inspections in the 280-meter long Luojia Shan tunnel.
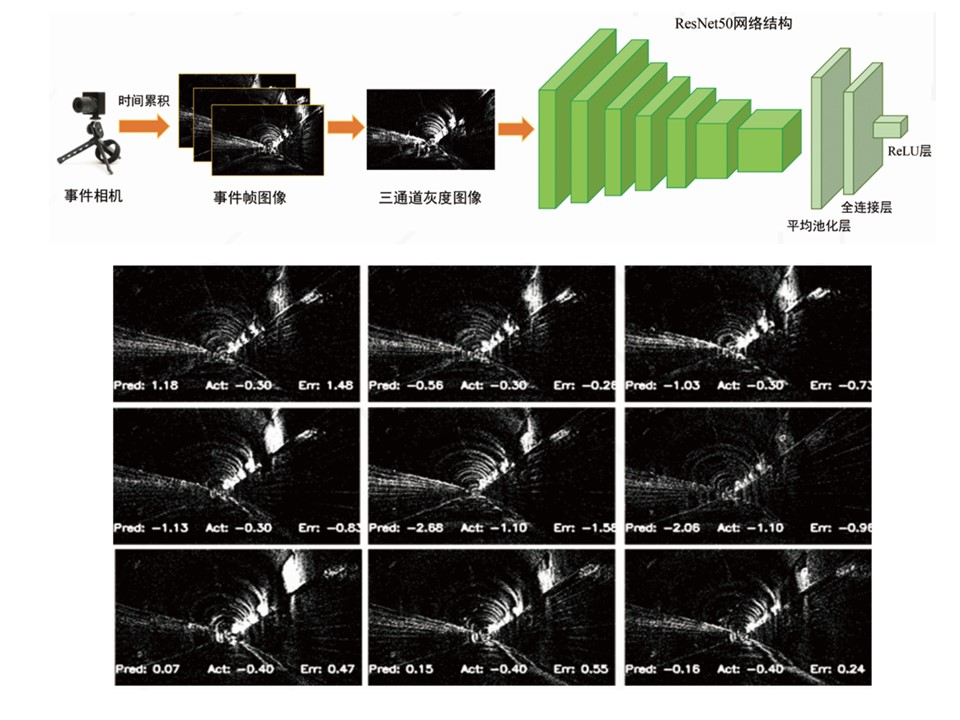
End-to-end Tunnel Perception (in progress)
Planning to develop an end-to-end tunnel perception algorithm using the event camera.

An Intelligent Unmanned Aircraft System for Wilderness Search and Rescue
H. Yu, S. Lin, J. Wang, K. Fu, W. Yang.
In this work, we developed a wilderness search and rescue (WiSAR) system based on DJI M100 Unmanned Aerial Vehicle (UAV) and a ground station to search and rescue the survivors in wild. We combined infrared and optical target detection to increase the detection speed and accuracy. And we used multiple sensors to make this system can autonomous avoiding obstructions and landing on mobile platform. To increase the detection accuracy of SSD, we adopted ResNet-101 as the base net. And trained it on the UAV-PP dataset. The actual flying test have been conducted in multiple situations to verify the feasibility of our WiSAR system. Paper accepted by IMAV and method has been granted a patent.
[Paper]