
About Me
I am a Ph.D. candidate in Robotics at The University of Hong Kong, supervised by Prof. Jia Pan, Wenping Wang, and Yifan (Evan) Peng (since 2024). My thesis focuses on Real-time Computational Neuromorphic Vision for Robotics. I was awarded the HKU Dissertation Year Fellowship.
My research interests include event-based / neuromorphic vision, computational imaging, and embodied AI.
News
- [2026] One paper accepted by IEEE Transactions on Robotics (EROAM).
- [2025] One paper accepted by IEEE Transactions on Robotics (Neupan).
- [2025] One paper accepted by NeurIPS (Lattice Boltzmann Model).
- [2025] One paper accepted by IROS (Stereo Event Camera Calibration).
- [2025] Awarded HKU Dissertation Year Fellowship.
- [2024] One paper published in Nature Communications.
- [2024] One paper accepted by IEEE Transactions on Image Processing.
- [2024] One paper accepted by CVPR 2024 (NetTrack).
- [2024] Gold Medal and TOP 20 BEST INVENTION AWARDS at iCAN 2024.
- [2024] Silver Medal at Geneva International Exhibition of Inventions 2024.
- [2022] One paper accepted by CVPR 2022 (Oral Presentation).
Education
Ph.D. in Robotics, The University of Hong Kong (09/2020 – Present) Advisor: Prof. Jia Pan, Wenping Wang, and Yifan (Evan) Peng Thesis: Real-time Computational Neuromorphic Vision for Robotics Awarded HKU Dissertation Year Fellowship
M.E. in Electronics Communication Engineering, Wuhan University (09/2017 – 06/2019) Advisor: Prof. Wen Yang Thesis: Development of an Intelligent UAV System for Tunnel Inspection Awarded National Scholarship for Postgraduate
B.S. in Electronics and Information Engineering, Sichuan University (09/2013 – 06/2017) Thesis: Pedestrian Detection Under UAV Perspective
Publications
Journal Articles
- W. Xing, S. Lin, L. Yang, Z. Zhang, Y. Du, M. Lei, Y. Pan, J. Pan, "EROAM: Event-based Camera Rotational Odometry and Mapping in Real-time", IEEE Transactions on Robotics, 2026.
- R. Han, S. Wang, S. Wang, Z. Zhang, J. Chen, S. Lin, C. Li, C. Xu, Y.C. Eldar, "Neupan: Direct point robot navigation with end-to-end model-based learning", IEEE Transactions on Robotics, 2025.
- S. Lin, G. Zheng, Z. Wang, R. Han, W. Xing, Z. Zhang, Y. Peng, J. Pan, "Embodied neuromorphic synergy for lighting-robust machine vision to see in extreme bright", Nature Communications 15(1), 10781, 2024.
- S. Lin, X. Zhang, L. Yang, L. Yu, B. Zhou, X. Luo, W. Wang, J. Pan, "Neuromorphic Synergy for Video Binarization", IEEE Transactions on Image Processing, 2024.
- S. Lin, F. Xu, X. Wang, W. Yang, L. Yu, "Efficient spatial-temporal normalization of SAE representation for event camera", IEEE Robotics and Automation Letters 5(3), 4265-4272, 2020.
- X. Wang, Y. Du, S. Lin, P. Cui, Y. Shen, Y. Yang, "adVAE: A self-adversarial variational autoencoder with Gaussian anomaly prior knowledge for anomaly detection", Knowledge-Based Systems 190, 105187, 2020.
- F. Xu, W. Yang, T. Jiang, S. Lin, H. Luo, G.S. Xia, "Mental retrieval of remote sensing images via adversarial sketch-image feature learning", IEEE Transactions on Geoscience and Remote Sensing 58(11), 7801-7814, 2020.
- W. Xing, S. Lin, L. Yang, J. Pan, "Target-free extrinsic calibration of event-lidar dyad using edge correspondences", IEEE Robotics and Automation Letters 8(7), 4020-4027, 2023.
- S. Lin, J. Wang, R. Peng, W. Yang, "Development of an autonomous unmanned aerial manipulator based on a real-time oriented-object detection method", Sensors 19(10), 2396, 2019.
Conference Articles
- S. Lin, Y. Zhang, L. Yu, B. Zhou, X. Luo, J. Pan, "Autofocus for event cameras", Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022. Oral Presentation
- S. Lin, Y. Zhang, D. Huang, B. Zhou, X. Luo, J. Pan, "Fast event-based double integral for real-time robotics", IEEE International Conference on Robotics and Automation (ICRA), 796-803, 2023.
- W. Xing, S. Lin, G. Zheng, Y. Du, J. Pan, "Simultaneous Synchronization and Calibration for Wide-baseline Stereo Event Cameras", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
- G. Zheng, S. Lin, Haobo Zuo, Si Si, Ming-Shan Wang, Changhong Fu, Jia Pan, "Lattice Boltzmann Model for Learning Real-World Pixel Dynamicity", Advances in Neural Information Processing Systems (NeurIPS), 2025.
- G. Zheng, S. Lin, H. Zuo, C. Fu, J. Pan, "Nettrack: Tracking highly dynamic objects with a net", Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024.
- W. Liao, X. Zhang, L. Yu, S. Lin, W. Yang, N. Qiao, "Synthetic aperture imaging with events and frames", Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022.
- Y. Lu, S. Lin, G. Chen, J. Pan, "ModLaNets: learning generalisable dynamics via modularity and physical inductive bias", International Conference on Machine Learning (ICML), 14384-14397, 2022. Long Presentation
Patent
- J. Pan, S. Lin, "Event-based auto-exposure for digital photography", WO2023025185A1, 2023.
Awards & Honors
Scholarship
- HKU Dissertation Year Fellowship, 2025
- Gold Medal and TOP 20 BEST INVENTION AWARDS at iCAN 2024
- Silver Medal of Geneva International Exhibition of Inventions 2024
- The Arthur and Louise May Memorial Fund Scholarship, 2023
- The Arthur and Louise May Memorial Fund Scholarship, 2022
- National Scholarship for Postgraduate (Top 1%), 2018
- 1st Prize, Postgraduate Academic Scholarship of Wuhan University (Top 5%), 2018
- 1st Prize, Postgraduate Academic Scholarship of Wuhan University (Top 5%), 2017
- 1st Prize, Postgraduate Entrance Scholarship of Wuhan University (Top 5%), 2017
- 1st Prize, Outstanding Scholarship of Sichuan University (Top 5%), 2016
International Competitions
- 1st Prize, National Postgraduate Electronic Design Competition, Team Leader (Top 0.2%), 2018
- ICRA2018 DJI Robomaster AI Challenge, Global Ranking: 6/70, Team Leader, 2018
- 1st Prize, Microsoft Imagine Cup, Team Leader (Top 1%), 2016
- 1st Prize, National Undergraduate Electronic Design Competition (Top 1%), 2015
Service
- Journal Reviewer: T-RO, TPAMI, TIP, RA-L (IEEE RAS Young Reviewers)
- Conference Reviewer: CVPR, ECCV, IROS, ICRA, ROBIO, ICML
- Teaching: COMP3270 Artificial Intelligence, 2023 Fall
- Invited Talks:
- International Congress of Basic Science (ICBS), Beijing, 2025
- Tsinghua University Invited Talk, 2025 (hosted by Prof. Muyuan Yang)
- The 8th Micro-Nano Optics Technology and Applications Symposium & PhotoniX Forum 2024, Shanghai
- IEEE/CVF CVPR 2022, New Orleans: "Autofocus for Event Camera"
Selected Projects

Efficient Spatial-Temporal Normalization of SAE Representation for Event Camera
In this work, we proposed a highly efficient normalization method named chain normalization and an improved ordering strategy. By embedding the inherent nature of SAE, our method can not only run fast but also reach the highest performance without manual parameter tuning. In the experiments, our algorithm can run significantly faster than the previous methods. To further validate the normalized results, we conduct object recognition experiments on two large event-based open datasets. Experimental results show that our method achieves the highest classification accuracy among other normalization methods.
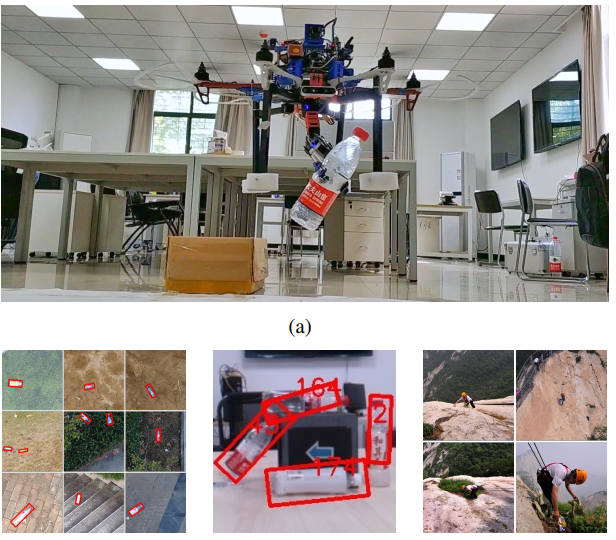
Toward Autonomous Rotation-Aware Unmanned Aerial Grasping
S. Lin, J. Wang, R. Peng, W. Yang.
In this work, we developed a vision-based autonomous UAM with a 3DoF robotic arm for rotational grasping and with a displacement compensation system for compensating the center of gravity. And we proposed a novel detection approach called Rotation-SqueezeDet to enable rotation-aware grasping, which can give the target position and rotation angle in near real-time on Jetson TX2.
[Open-hardware] [Paper]
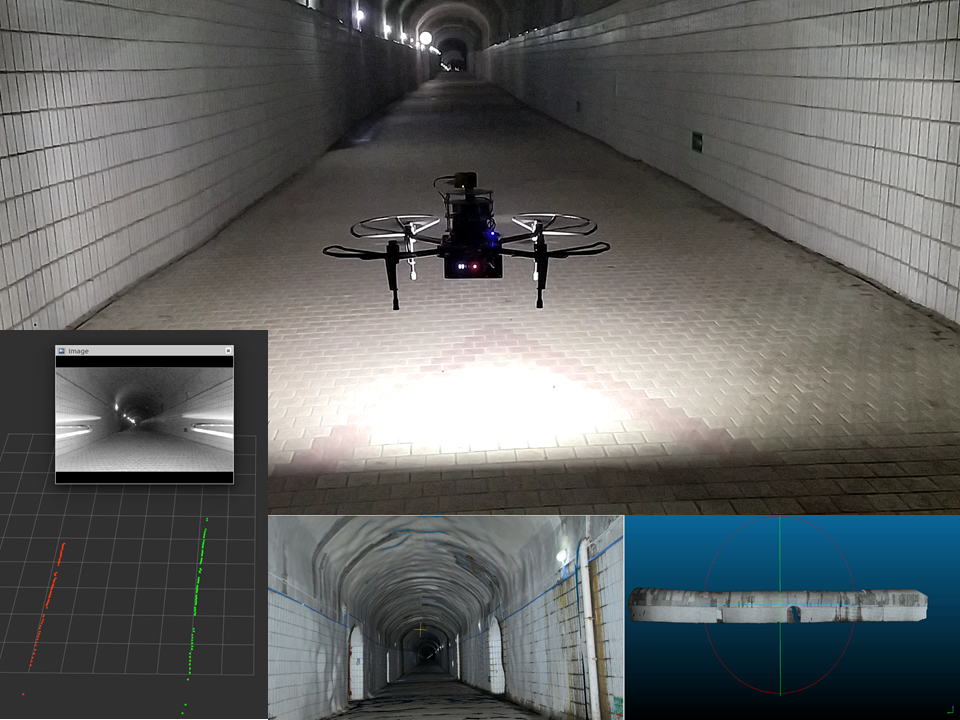
Development of an Intelligent Unmanned Aircraft System for Tunnel Inspection
In this work, I developed a tunnel inspection system based on Pixhawk4 and DJI M100 drone. I employed point cloud filters and RANSAC line fitting for tunnel perception. And I employed VINS-Mono for localization. With several lab members, I successfully conducted multiple autonomous inspections in the 280-meter long Luojia Shan tunnel.

An Intelligent Unmanned Aircraft System for Wilderness Search and Rescue
H. Yu, S. Lin, J. Wang, K. Fu, W. Yang.
In this work, we developed a wilderness search and rescue (WiSAR) system based on DJI M100 Unmanned Aerial Vehicle (UAV) and a ground station to search and rescue the survivors in wild. We combined infrared and optical target detection to increase the detection speed and accuracy. And we used multiple sensors to make this system can autonomous avoiding obstructions and landing on mobile platform. Paper accepted by IMAV and method has been granted a patent.
[Paper]
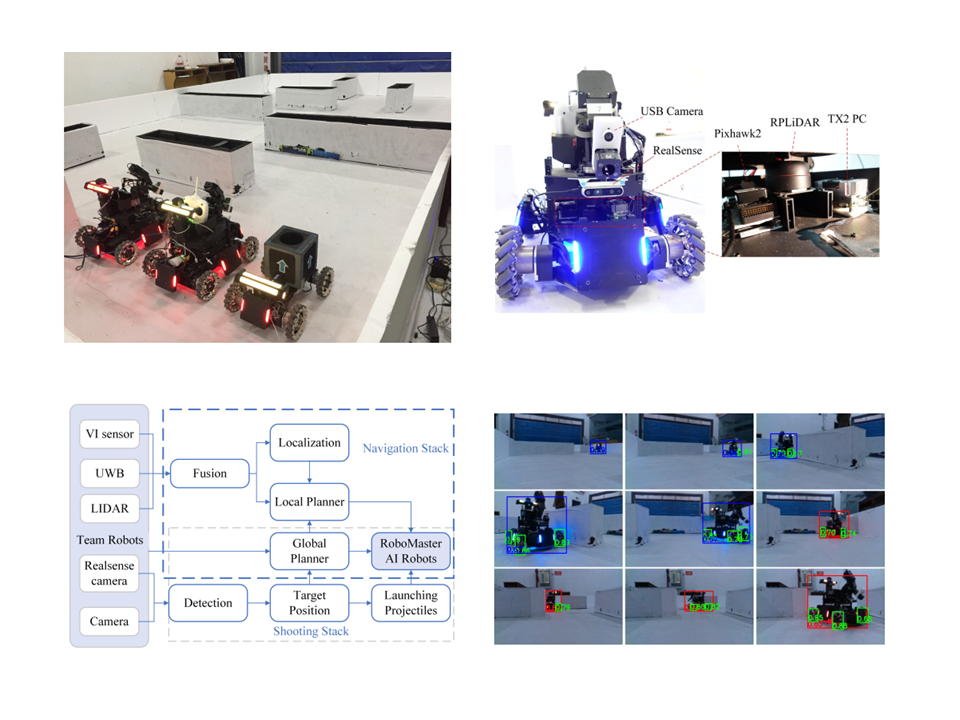
ICRA2018 DJI Robomaster AI Challenge
W. He, S. Lin, Q. Cui, R. Peng, J. Wang, H. Yu.
The ICRA 2018 DJI RoboMaster AI Challenge requires robots to drive and launch projectiles using artificial intelligence related technologies. Each team is required to build up to TWO autonomous AI robots to compete in a 5m × 8m arena filled with various obstacles.
We won the Finalist Prize, Global Rank:6/70 of ICRA2018 DJI Robomaster AI Challenge
Tech: ROS, C++, Python, Tensorflow, Solidworks, Embedded Programming